Kinodynamic Optimal Path Planning
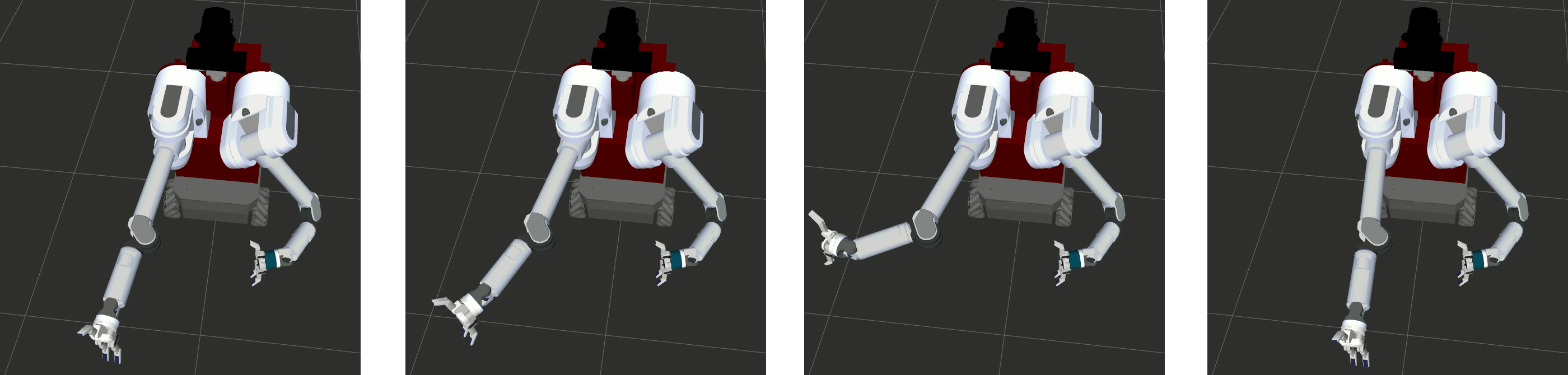
- Daqing Yi, Rohan Thakker, Cole Gulino, Oren Salzman and Siddhartha Srinivasa, Generalizing Informed Sampling for Asymptotically Optimal Sampling-based Kinodynamic Planning via Markov Chain Monte Carlo ICRA 2018, May 2018.[Paper]
Qualitative Information Fusion
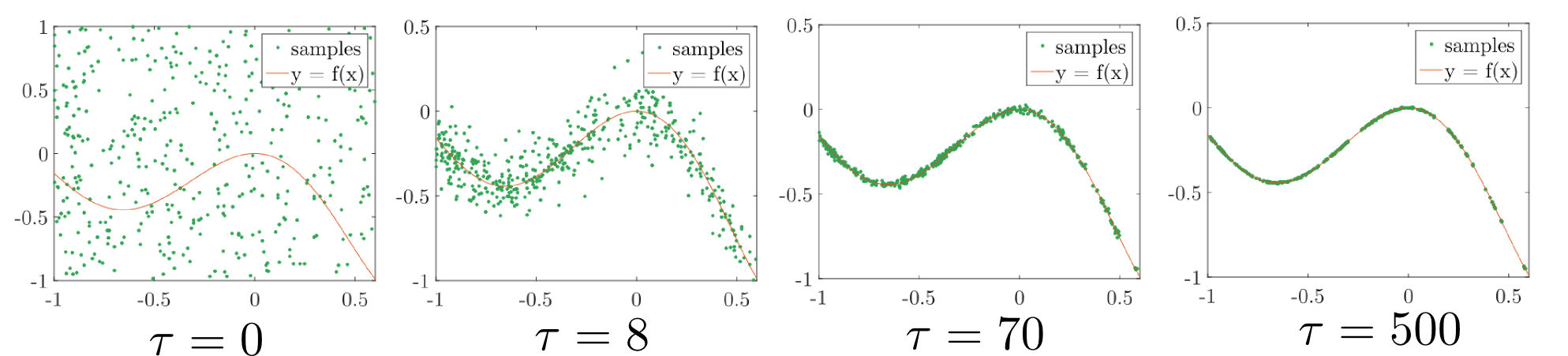
- Daqing Yi, Shushman Choudhury and Siddhartha Srinivasa, Incorporating Qualitative Information into Quantitative Estimation via Sequentially Constrained Hamiltonian Monte Carlo Sampling IROS 2016, September 2017.[Paper]
Multi-Objective Path Planning
There are usually multiple criteria in a high-level task. Conflict and incomparability among criteria leads to a multi-objective path-planning problem.
Obtaining a set of Pareto optimal paths in a path planning problem with multiple objectives helps the planner finding the desired path. Inspired by the decomposition approach in multi-objective optimization, we introduce a forest that consists of a set of RRT* trees to find a set of Pareto optimal paths.
- Jeongseok Lee, Daqing Yi and Siddhartha Srinivasa, Sampling of Pareto-Optimal Trajectories using Progressive Objective Evalution in Multi-Objective Motion Planning IROS 2018, October 2018. [Paper]
-
Daqing Yi, Michael A. Goodrich and Kevin D. Seppi, MORRF*: Sampling-based Multi-Objective Path Planning. IJCAI 15,July 2015. [Paper] [Preprint] [Slides] [Poster]
- Meher T. Shaikh, Michael A. Goodrich, Daqing Yi and Joseph Hoehne, Interactive multi-Objective Path Planning through a Palette-based User Interface. Proc. SPIE 9837, Unmanned System Technology XVIII, May 2016.[Paper]
- Meher Shaikh, Michael A. Goodrich and Daqing Yi, Adverb Palette: GUI-based Support for Human Interaction in Multi-Objective Path-Planning. HRI 2016 - Late Break Report,March 2016.[Paper]
Homotopy-based Path Planning
A path topology is a natural and efficient expression in high-level intent. Introducing high-level information to a robot's task with objective generates a topology-based optimal path-planning problem. We adapt homotopy class for classifying path topologies and look at finding the optimal paths of a set of homotopy classes.
We propose an algorithm that returns the optimal paths of different homotopy classes simultaneously.
-
Daqing Yi, Michael A. Goodrich and Kevin D. Seppi, Homotopy-Aware RRT*: Toward Human-Robot Toplogical Path-Planning. HRI 2016,March 2016.[Paper][Preprint] [Slides]
- Daqing Yi, Michael A. Goodrich, Thomas M. Howard and Kevin D. Seppi, Topology-Aware RRT* for Parallel Optimal Sampling in Topologies 2017 IEEE SMC, October 2017.(Best Paper Winner)[Paper]
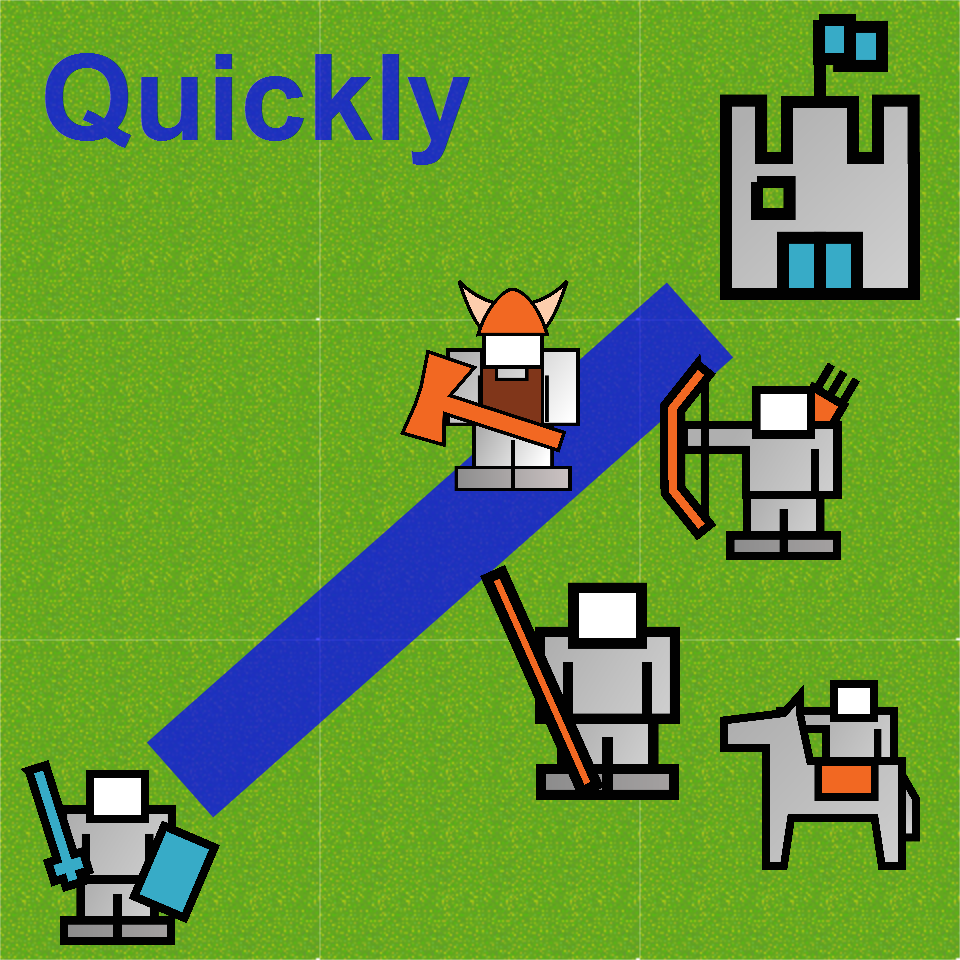
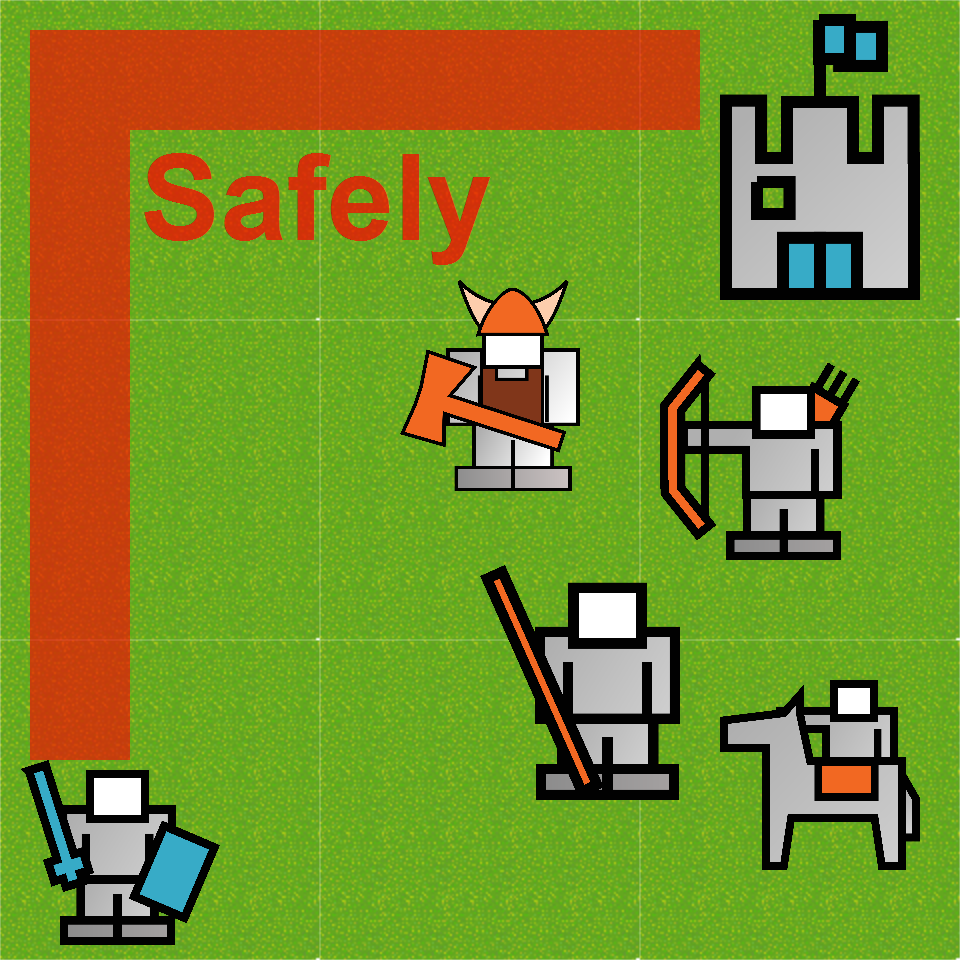
Model Path-Planning Problem from Natural Language
A language interface helps a robot receive natural information from untrained people. We are developing algorithms that convert a language instruction into a path by integrating language understanding with path-planning. The path-planner should be capable of dealing with the ambiguity in language.
- Rosario Scalise, Yonatan Bisk, Maxwell Forbes, Daqing Yi, Yejin Choi and Siddhartha Srinivasa, Balancing Shared Autonomy with Human-Robot Communication. [Paper]
- Daqing Yi, Thomas M. Howard, Michael A. Goodrich and Kevin D. Seppi, Expressing Homotopic Requirements for Mobile Robot Navigation through Natural Language Instructions IROS 2016, October 2016. [Paper]
- Daqing Yi, Instructing Quantitative Path-Planning by Qualitative Language Expression. IJCAI 2016 Doctoral Consortium,July 2016. [Paper]
-
Daqing Yi and Michael A. Goodrich, Supporting task-oriented collaboration in human-robot teams using semantic-based path planning. Proc. SPIE 9084, Unmanned Systems Technology XVI, 90840D, June 2014.[Paper] [Preprint]
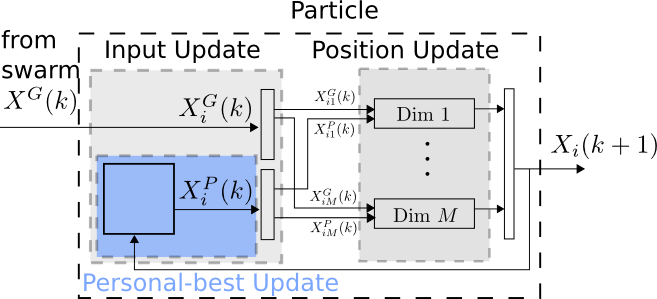
Multi-Agent Consensus Reaching
Modeling the dynamics of optimization algorithm into discrete-time system allows the import of the nonlinear system analysis. We decompose the PSO into networked component and introduce input-to-state stability analysis to understand the condition of the algorithm convergence.

- Daqing Yi, Kevin Seppi and Michael Goodrich, Understanding Particle Swarm Optimization: A Component-Decomposition Perspective CEC 2018, July 2018. [Paper]
-
Daqing Yi, Kevin D. Seppi and Michael A. Goodrich, Input-to-State Stability Analysis on Particle Swarm Optimization. GECCO 15,July 2015. [Paper] [Preprint] [Slides]
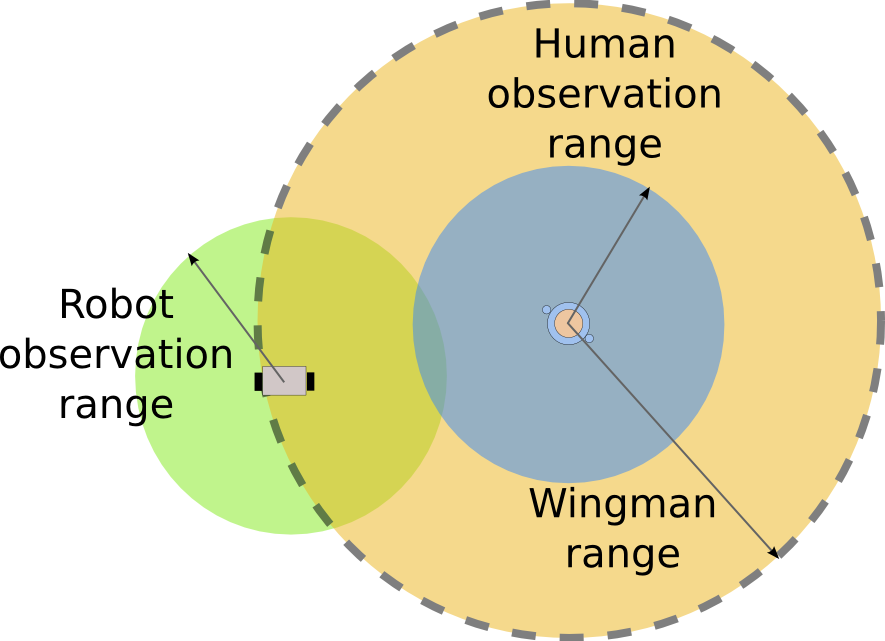
Submodular Path Planning with a Reference-Path Constraint
In the collaborative search task, the robot's motion is expected to maximize the information while be constrained by a human's motion. By utilizing the submodularity in a coverage model and converting the human's constraint into a multi-partite graph structure, we proposed the algorithm that finds the optimal path given enough run time.
-
Daqing Yi, Michael A. Goodrich and Kevin D. Seppi, Informative Path Planning with a Human Path Constraint. 2014 IEEE SMC, October 2014. [Paper] [Preprint] [Slides]
-
Michael A. Goodrich and Daqing Yi, Toward Task-Based Mental Models of Human-Robot Teaming: A Bayesian Approach. Virtual Augmented and Mixed Reality. Designing and Developing Augmented and Virtual Environments, July 2013. [Paper] [Preprint]
Visual Enhancement by Signal Noise
Random jitter imposes the noise to the neuron system. However, it recovers the information lost in the conversion. Analyses explain how the random jitter actually enhances the human's visual system and how it can be introduced to improve the performance of any visual sensory system.
-
Daqing Yi, Ping Jiang, Edward Mallen, Xiaonian Wang and Jin Zhu, Enhancement of image luminance resolution by imposing random jitter. Neural Computing & Applications, vol. 20, 2011. [Paper]
-
Daqing Yi, Ping Jiang and Jin Zhu, A Simple Neural Network for Enhancement of Image Acuity by Fixational Instability. Advances in Neural Networks-ISNN 2009, Lecture Notes in Computer Science, May 2009. [Paper]
Adaptive Iterative Learning Control
In a planar motion control with arbitrarily mounted camera, the observation model is defined by an unknown homography matrix. We proposed the control algorithm, which consists of the Nussbaum gain probing (coarse tuning) and the iterative learning (fine tuning). Given any expected trajectory, the algorithm could learn the system input by the iterative trial process without deployment information.
-
Daqing Yi, Jian Wu and Ping Jiang, Iterative learning control for visual servoing with unknown homography matrix. ICCA 2007,May 2007. [Paper]